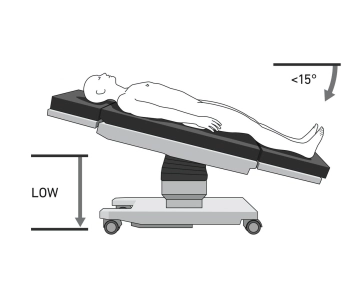
El paciente se posiciona en decúbito supino en una ligera posición anti-Trendelenburg de aprox. 10-15 grados sobre el gran cojín de vacío. El brazo izquierdo se posiciona lateralmente en un riel de soporte para brazo, para mantener libre el área operatoria y optimizar el acceso para el equipo quirúrgico así como para los brazos robóticos. Mediante el uso del cojín de vacío, por lo general se prescinde de todos los soportes adicionales, lo que acelera la preparación.
Nota: El posicionamiento exacto del paciente es de importancia decisiva para el éxito de la operación, ya que garantiza el acceso óptimo de los brazos robóticos a los sitios operatorios en la cavidad abdominal y minimiza el riesgo de complicaciones.
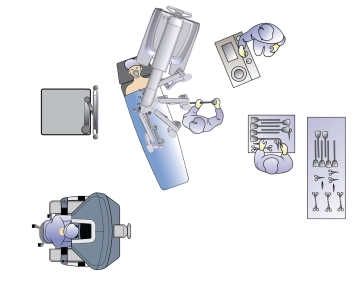
El equipo quirúrgico consta generalmente de dos cirujanos: el cirujano de consola, que controla el robot desde una consola, y el asistente de mesa, que asiste directamente en la mesa operatoria. El asistente de mesa se sienta a la izquierda del paciente. La torre de vídeo, que transmite las imágenes de la cámara robótica, se encuentra a la derecha a la altura del tronco. La anestesia se encuentra en la cabecera del paciente. El personal de enfermería de quirófano se encuentra a la izquierda del asistente de mesa
Precaución: El posicionamiento correcto adquiere una importancia especial debido al acoplamiento del paciente al manipulador del robot. Un posicionamiento incorrecto o un deslizamiento del paciente durante la operación conlleva un riesgo considerable de lesiones en la pared abdominal por los brazos robóticos o los instrumentos. Por lo tanto, es imprescindible una verificación cuidadosa del posicionamiento antes del inicio de la operación.
Observación: Los cojines de vacío pueden desarrollar fugas con el tiempo. Antes de la cobertura estéril del paciente, por lo tanto, se debe verificar nuevamente la estanqueidad del cojín de vacío para garantizar un soporte seguro y estable del paciente durante toda la intervención. También se recomienda un mantenimiento regular de los cojines de vacío.