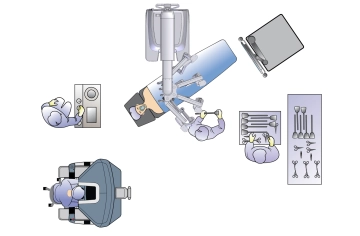
- Ideally, positioning is done in the lithotomy position on a large vacuum cushion (on the right side, the cushion supports the rib cage and iliac crest so that the patient's weight in right lateral position does not press on the arm.
- It is recommended to adduct both arms (caution: cotton wrapping when positioning with a cloth sling)
- Cotton wrapping of the knees and proximal lower legs is also performed to prevent pressure injuries.
- For leg positioning, so-called "swan-fins" or padded "boots" are recommended, so that the legs can be moved separately and covered sterilely if necessary. Alternatively, the legs can be positioned in leg holders with fixation in these.
- The legs should be adjustable via the OR table control during the procedure.
Note: Positioning is of particular importance due to docking the patient to the robot manipulator. The risk of injury to the abdominal wall when the patient slips must also be considered. With coupled tables in the Xi system, intraoperative position changes are possible without undocking. In the absence of "Table-Motion" technology, the surgical robot must always be undocked and removed from the OR table before any position change.
Caution: Vacuum cushions can have leaks. Therefore, they should be checked again before sterile draping.