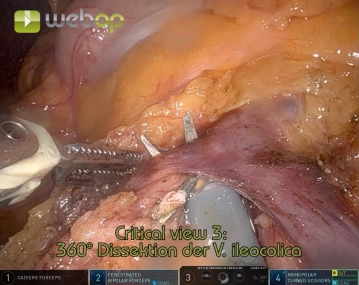
Posicionamiento en decúbito supino del paciente y acolchado de las extremidades así como de los puntos expuestos a presión.
Colocación de ambos brazos del paciente.
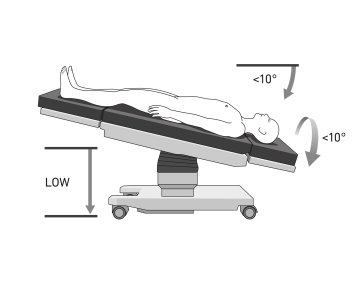
Posicionamiento en 10° anti-Trendelenburg y 10° decúbito lateral izquierdo, mesa lo más baja posible
Para la reducción máxima de daños por posicionamiento y para garantizar un posicionamiento seguro, se recomienda un posicionamiento en el colchón de vacío
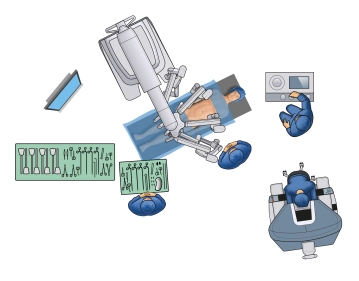
Nota: El posicionamiento adquiere una importancia especial debido al acoplamiento del paciente al manipulador del robot. También debe tenerse en cuenta el riesgo de lesión de la pared abdominal en caso de deslizamiento del paciente. Mediante mesas acopladas en el sistema Xi, es posible un cambio de posición intraoperatorio sin desacoplar. En ausencia de la técnica „Table-Motion“, antes de cada cambio de posición, el robot quirúrgico debe desacoplarse siempre y retirarse de la mesa de operaciones.
Precaución: Los cojines de vacío pueden tener fugas. Por lo tanto, deben revisarse nuevamente antes de la cobertura estéril.