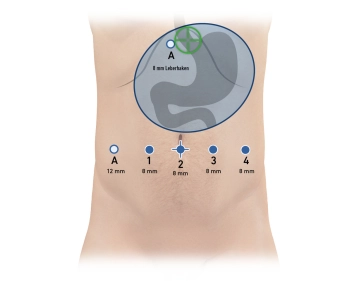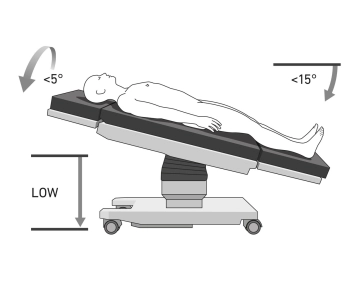
Se almacena en posición supina sobre el gran cojín de vacío. Gracias al uso del cojín se eliminan todos los soportes adicionales. Las extremidades y todos los puntos propensos a la presión se acolchan. Se recomienda una barra para proteger al paciente de los brazos del robot. Después de insertar los trocares, la mesa de operaciones se inclina en aprox. 15° anti-Trendelenburg y aprox. 5° posición lateral derecha (Tilt right). El robot quirúrgico se acerca y los brazos del robot se acoplan.
Cave: La posición adquiere una importancia especial debido al acoplamiento del paciente al manipulador del robot. Riesgo de lesión de la pared abdominal si el paciente se desliza.
Observación: Los cojines de vacío pueden tener fugas. Verificar nuevamente antes de la cobertura estéril.
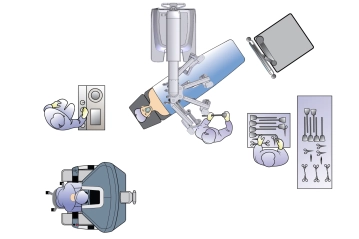
Se elige la siguiente configuración: El cirujano se sienta en la consola idealmente también con la posibilidad de mirar al paciente y al asistente de mesa. El asistente de mesa se sienta a la derecha del paciente. La anestesia se encuentra en la cabeza del paciente. El carro del paciente se acerca desde la izquierda al paciente y la enfermera instrumentista de quirófano se encuentra a la derecha del asistente de mesa